139-0510-5992(微信号)
177-6896-6998
139-0510-5992(微信号)
177-6896-6998

江苏昱博自动化设备有限公司
业务专线:13905105992(微信号)
业务电话:17768966998
业务联系人:王三祥
邮编:224007
邮箱:yubozdh@163.com
地址:江苏省盐城市经济技术开发区漓江 路42号昱博产业园
网址:www.ycsxgs.com


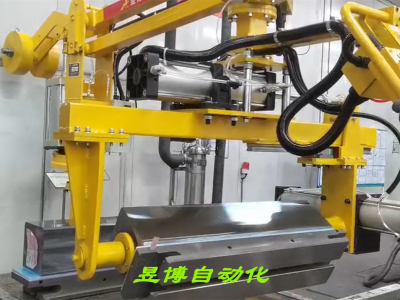
气动助力机械手(又称反力臂、平衡器、平衡吊、气动助力器、手动移载机等)是一种运用负载检测及气压反馈原理对重物实现自动平衡的设备。它巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉,实现在空间内平衡移动,并通过实施很小的操作力(行业内以小于2.5kg为判断标准)破坏其气压平衡,将重物高效快速地从一个工位移到另一个工位。

助力机械手负载重量确定后,将主体结构设计了三种规格,来满足不同的承重要求。选择三个型号的普通气缸。各结构尺寸初步确定后,最为关键的是保证整个运动过程平稳、操作负载均匀、实现任意调整且达到最优的使用效果。
通过几何推倒与计算分析,利用Excel辅助VBA编程,实现数据的自动计算及分析。以助力机械手缸径为0100mm标准型气缸为例,介绍一下计算步骤及模拟方法。0为坐标原点,粗实线为起始位置,双点划线为运动过程的任意位置。在Excel中编辑以上公式,任意输入各已知参数,便可自动计算出助力机械手气缸拉力及平衡位置等参数,通过对不同参数的试验,寻找其中规律,确定最终的数值。若助力机械手气缸伸长量在0~150mm范围内连续取值,会得到各参数的一组数据,利用该组数据可以描述出相关曲线,确认平衡力的趋势。Exce1可以自动处理数据,挑出最大值、最小值、平均值等,并将各数值描绘为曲线,将极值标在曲线上,非常方便和直观。